傳統的消隙,基本是剛性或柔性的機械消隙法。機械消隙法,會增加機械結構的復雜性,而且機械消隙可靠性差。反向間隙補償,需要先進行測量,特別是采用半閉環控制的數控機床,需要在平時注重研究造成反向間隙的因素、使用反向間隙補償功能對機床的進給傳動鏈進行補償。同時,滾軸絲杠又有螺距誤差,而且每個位置的反向間隙各不相同。
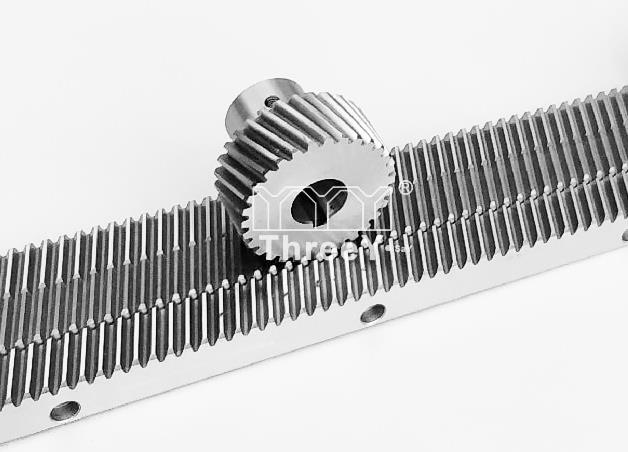
首先,齒輪的位置不要固定,要做成可調節的,比如偏心軸承座結構或長孔,微調齒輪齒條的嚙合間隙,控制系統必須設置回程間隙補償指令,調整齒輪反轉后的傳動間隙,根據實際的間隙值來調整伺服電機脈沖數。齒輪齒條傳動的自動消息裝置,腦闊機床底座和驅動梁,驅動梁沿設置于機床底座上的直線導軌滑動,在驅動梁端部設置伺服電機和與伺服電機連接的傳動齒輪,傳動齒輪與設置于機床底座上的齒條嚙合,在驅動梁端部設置有安裝板,在安裝板上設置有轉軸架和支架,轉軸架和減速機安裝架一側通過轉軸連接在一起,在減速機安裝架的對側設置有突出的耳板,一螺栓穿過耳板上的通孔與支架螺紋連接,在螺栓頭部和耳板之間套裝有碟形彈簧組。
當傳動負載小時,可以采用雙片薄齒輪錯齒調整法,分別與齒條的左右兩側齒槽面貼緊,從而消除齒側間隙。當傳動負載大時,可采用雙厚齒輪傳動的結構。
采用雙驅進給系統,即利用伺服控制達到消隙,雖然雙驅系統克服了機械消隙的缺點,但高精度、高速的齒輪傳動系統中,制造裝配誤差對傳動精度的影響非常大。